Méthode des éléments finis/Rappels de mécanique
Introduction
modifierL'objectif de ce chapitre est de faire des rappels sur les notions fondamentales de mécanique nécessaires pour l'utilisation d'un logiciel d'éléments finis.
Modélisation
modifierLa modélisation est le passage de la réalité aux objets mathématiques : scalaires (nombres), vecteurs, torseurs, …
Description d'un solide
modifierLa première manière de décrire un solide est le point matériel :
- (G, m)
un point, le centre de gravité G (x, y, z ) du solide, associé à la masse m du solide. Cela donne lieu à la mécanique du point, utile pour décrire le mouvement d'objets petits par rapport à leur trajectoire, des astres ou bien des molécules de gaz par exemple. Mais cette description est insuffisante dès que l'on veut prendre en compte des phénomènes comme la rotation de l'objet ou sa déformation.
La deuxième description est le solide discret indéformable : un ensemble de points matériels (Ai, mi ) tel que les distances deux à deux AiAj sont constantes. On peut ainsi décrire des objets reliés entre eux. Cette méthode permet de définir les notions de rotation (vitesse et accélération angulaire, moment d'inertie, moment dynamique).
La troisième description est le solide continu indéformable : un ensemble continu de points appartenant à une portion de l'espace V (un volume), et à chaque point A est associé une masse volumique ρ(A). C'est cette description qui est la plus couramment utilisée en statique, cinématique et dynamique des solides.
La dernière description qui nous concerne est le solide élastique déformable. La distance entre deux points A et B peut varier au cours du temps, tout en respectant un certain nombre de règle ; en particulier, il n'y a pas apparition de cavité (fissure). Cela mène aux équations de l'élasticité de la mécanique des milieux continus.
Description de l'Univers
modifierNous nous plaçons dans le cadre de la mécanique classique, dans le cadre habituel du génie mécanique.
Le solide tel que défini ci-dessus évolue selon certaines lois, les lois de la mécanique. Ces lois dérivent des lois du mouvement établies par Newton[1], qui ne concernent que le point matériel. Newton a découvert ces lois en s'intéressant à l'astronomie : en première approximation, le mouvement des astres n'est soumis qu'à une seule action, celle du poids, il n'y a en particulier pas de phénomène de frottement ni de contact ce qui rend leur étude très simple. Nous formulons ces lois dans un contexte moderne.
Première loi de Newton
modifier|
principe d'inertie |
|
Dans un référentiel galiléen, un objet isolé a un mouvement rectiligne et uniforme : son vecteur vitesse est constant. |
Cela définit deux choses. La première est la notion de solide isolé. Un solide est isolé s'il ne subit aucune action extérieure. Ce cas est tout à fait théorique : un objet dans l'espace intersidéral ne subit aucun contact, mais tout de même l'attraction des astres alentours (le poids). Dans la pratique, on dira que le mouvement est rectiligne et uniforme si les actions extérieures s'annulent ; par exemple, une boule rigide roulant sur un sol rigide horizontal, en négligeant le frottement de l'air, le sol supportant le poids et annulant son action.
La seconde est la notion de référentiel galiléen. Un mouvement est toujours défini par rapport à un observateur, c'est le référentiel. D'un point de vue pratique, un référentiel est un objet matériel à partir duquel on définit un repère , et possédant un chronomètre, une horloge. Un référentiel est galiléen si un objet isolé a un mouvement rectiligne et uniforme. Pour les applications technologiques, nous considérerons que le repère lié au sol est un référentiel galiléen (en négligeant donc l'action de la rotation de la Terre : force centrifuge et effet Coriolis[2]).

Dans une étude statique, la première chose est donc d'isoler un solide, c'est-à-dire de recenser les actions extérieures qui agissent sur lui, que l'on peut retenir comme étant les « trois P » : poids, pressions, points de contact (actions de contact).
Deuxième loi de Newton
modifier|
principe fondamental de la dynamique |
|
Dans un référentiel galiléen, la modification du mouvement d'un point matériel (G, m) sous l'effet d'une force extérieure est
Si la masse m du solide est constante : où est l'accélération du point matériel, c'est-à-dire . |



On a une notion intuitive d'effort, que l'on peut quantifier par la déformation d'un objet souple (par exemple un ressort) : plus l'effort est important, plus la déformation est importante (c'est le principe du dynamomètre). Cette loi établit donc que l'accélération est proportionnelle à cet effort[3].
Notons que cette loi n'est pas simplement une relation qui relie des grandeurs (accélération, masse, force).
La formule loi définit l'inertie d'un objet, la capacité à résister à une mise en mouvement : c'est la masse m, exprimée en kilogrammes (kg).
Et c'est cette loi qui définit véritablement ce qu'est une force. En effet, l'accélération est définie par la cinématique (à partir de la définition du mètre et de la seconde), et la force est donc le phénomène proportionnel à cette accélération,
- .

On passe donc d'une définition intuitive, la déformation d'un objet, à une définition rigoureuse en fonction d'autres phénomènes étalonnés. Le newton est alors défini comme étant la force provoquant une accélération de 1 m∙s-2 sur une masse de 1 kg (1 kg = 1 kg∙m∙s-2).
Nous nous intéressons essentiellement à la statique, c'est-à-dire au cas où l'accélération est nulle. Cela nous mène donc au principe fondamental de la statique (PFS) :
|
principe fondamental de la statique |
|
Dans un référentiel galiléen, un point matériel (G, m) est à l'équilibre si et seulement si les actions mécaniques extérieures qui s'exercent sur lui s'annulent.
|

La notation « i/G » désigne l'action d'un corps i sur le point matériel (G, m), i appartenant à « l'extérieur de G », c'est-à-dire que i est distinct du corps représenté par le point matériel (G, m). On utilise aussi la notation « i → G ».
| Grandeur | uSI | unités usuelles |
|---|---|---|
| Force | newton (N) | décanewton (daN), kilonewton (kN) kilogramme-force (kgf) |
| Masse | kilogramme (kg) | gramme (g), milligramme (mg), migrogramme (µg), tonne (t, Mg) |
| Accélération | mètre par seconde au carré (m/s2, m·s-2) |
g (g) |
avec
- force :
- 1 daN = 10 N ;
- 1 kN = 1 000 N ;
- 1 kgf = 9,81 N ≈ 1 daN ;
- masse :
- 1 g = 0,001 kg ;
- 1 mg = 0,000001 kg ;
- 1 µg = 0,000000001 kg ;
- 1 t = 1 000 kg ;
- accélération :
- 1 g = 9,81 m∙s-2 ≈ 10 m∙s-2.
Troisième loi de Newton
modifier|
principe des actions réciproques (ou mutuelles) |
|
Si un corps 1 exerce une force sur une corps 2, alors le corps 2 exerce lui aussi une force sur le corps 1, ; cette force a la même direction, la même intensité, mais est de sens opposé : |



Notons que lorsque l'on isole le solide 1, on ne s'intéresse qu'aux actions extérieures, donc à . La force existe, mais ne participe pas à l'équilibre de 1. Ce principe permet d'étudier successivement l'équilibre de plusieurs corps en contact les uns avec les autres (chaîne cinématique).
Action mécanique
modifierDéfinition et caractérisation
modifierUne action mécanique est un phénomène pouvant provoquer une accélération (modification du mouvement) ou une déformation (modification de la forme d'un solide). Du point de vue phénomène, on distingue :
- les actions à distance, agissant sur chaque point d'un objet : poids (action de la Terre sur l'objet, gravité), électromagnétisme ;
- les actions de contact, qui résultent du contact entre deux objets solides, ou bien entre un objet solide et un fluide (liquide ou gaz, d'un circuit hydraulique/pneumatique ou du milieu).
Pour décrire une action mécanique, il faut une intensité (un nombre) mais aussi la direction et le sens de l'effort. On utilise donc un vecteur. On distingue deux modèles d'action mécanique :
- les actions mécaniques « en ligne droite » : les forces, dont l'intensité est en newtons (N) ;
- les actions mécaniques « en rotation » : les moments, dont l'intensité est en newtons-mètres (Nm).
Pour un point matériel, on ne considère que des forces puisqu'il n'y a pas de rotation propre. Un moment agissant sur un solide peut se voir comme l'action combinée de forces sur chacune de ses parties élémentaires.
| Action | Effets | |
|---|---|---|
| Mouvement | Déformation | |
| Force | translation | traction, compression, cisaillement |
| Moment | rotation | torsion, flexion |
Une action mécanique « force » agit sur un volume (action à distance) ou sur une surface (action de contact), mais pour décrire son effet, on peut considérer qu'elle agit en un point, appelé « centre d'action » ou « point d'application ». La droite ayant la direction du vecteur et passant par le point d'application est appelée « droite d'action ».

Un moment peut être décrit comme deux forces opposées ayant des droites d'action parallèles ; on parle donc aussi de « couple ». La distance entre les droites d'action est appelée « bras de levier ». La direction du vecteur moment est l'axe de rotation/flexion/torsion. Le sens du vecteur détermine le sens de l'action, selon la règle de la main droite (ou du tire-bouchon).
Les principales actions mécaniques sont :
- forces :
- le poids : on considère que l'on est sur Terre à une altitude donnée, donc avec un champ de gravité uniforme ;
le poids est donc une force verticale, dirigée vers le bas, et ayant pour intensité p = mg où m est la masse de l'objet en kilogrammes (kg) et g est l'accélération de la gravité, g = 9,81 m∙s-2 ≈ 10 m∙s-2 ;
un élément de matière de volume dV a un poids où ρ est la masse volumique (densité) de la matière ;
le point d'application global équivalent à toutes ces forces est le centre de gravité de l'objet, noté G ; - la pression d'un fluide : c'est une force répartie sur une surface d'aire S ; la densité surfacique de force est appelée pression P et s'exprime en pascals (1 Pa = 1 N∙m-2) ;
un élément de surface d'aire dS subit une force perpendiculaire à la surface, dans le sens de la poussée, et d'intensité df = PdS ;
le point d'application global équivalent à toutes ces forces est le centre de poussée ; si la surface est plane et d'aire S, la force totale vaut F = PS (ou P = F/S) ; - les actions de contact entre solides : elles dépendent de la nature du contact, que l'on modélise par des liaisons ; d'un point de vue microscopique, un solide exerce une pression sur l'autre ;
- le poids : on considère que l'on est sur Terre à une altitude donnée, donc avec un champ de gravité uniforme ;
- moments :
- couple : soient deux forces décrites par des vecteurs et et dont les droites d'action sont distantes de d, alors l'intensité du moment couple est M = F×d ;
si A est un point de la droite d'action de et B un point de la droite d'action de , alors le vecteur moment du couple se calcule par le produit vectoriel ;
un opérateur manœuvrant un volant à deux mains exerce un couple, chaque main exerçant une force opposée à l'autre ; si l'opérateur manœuvre une manivelle, alors la main exerce une force et c'est l'axe de la manivelle qui exerce la deuxième force opposée ; - un moteur asynchrone (modèle de moteur électrique à courant alternatif triphasé) a en général un nombre de bobinages multiple de trois ; bien que l'on ait trois forces (ou six, ou …), l'effet global est un couple ;
- un tournevis ou une visseuse-dévisseuse avec une douille à six pans creuse (pour une vis ou un écrou à tête hexagonale) transmet six forces, une par face de contact ; l'effet global est également un couple.
- couple : soient deux forces décrites par des vecteurs et et dont les droites d'action sont distantes de d, alors l'intensité du moment couple est M = F×d ;





Moment d'une force
modifierSi un objet est soumis uniquement à une force, alors il accélère en translation. Pour qu'il tourne, il faut mettre un obstacle à la translation d'au moins un point de la pièce. L'exemple typique est le pivot d'un levier ; ce pivot est supposé fixe dans le référentiel.
Considérons un objet 1, et un objet 2 exerçant une force une force sur 1 en un point A, le vecteur force étant noté . Le pivot de 1, situé en B, exerce une action opposée, ce qui forme un couple. Le moment de ce couple est appelé « moment de la force en B » et est noté ou bien , avec



- .

Le pivot peut être « virtuel » : on peut définir le moment de la force par rapport à un point sans qu'il y ait réellement un pivot en ce point.
Action mécanique équivalente et résultante
modifierConsidérons un corps 1, et les actions de deux corps 2 et 3, modélisables par des forces :
- l'action de 2 sur 1 se fait au point A et est modélisée par le vecteur ;
- l'action de 3 sur 1 se fait au point B et est modélisée par le vecteur .

Si les actions ne forment pas un couple (donc si ), alors on peut synthétiser les deux effets par une force unique appelée résultante et notée qui est la somme vectorielle des deux forces :


- .

Le point d'application de la résultante, I, est choisi de sorte que le moment de par rapport à n'importe quel point C, on ait

ce que l'on peut aussi noter

En statique et en dynamique, on peut donc remplacer deux forces ne formant pas un couple par leur résultante.
Par ailleurs, toujours en statique et en dynamique, l'effet d'une force est le même si l'on déplace le point d'application sur la droite d'action ; on parle de « glisseur ».
En résistance des matériaux par contre, la position du point d'application a son importance, et l'on ne peut pas remplacer deux forces par leur résultante.
En ce qui concerne les couples (paires de forces opposées), la position des forces du couple n'a pas d'importance tant que la distance entre les droites d'action reste la même ; un couple n'a pas de point d'application.
Description analytique
modifierUne action mécanique — l'action d'un corps 1 sur un corps 2 — peut donc être décrite par deux vecteurs : un vecteur force s'appliquant au point A et un champ de vecteur moment . Dans un repère donné, on a donc six composantes vectorielles, trois par vecteur :



Dans le cas d'une force, on a :
- .

Dans le cas d'un couple, on a

et le champ de vecteur moment est uniforme.
Le champ de vecteur moment est un champ équiprojectif[4] dont la résultante est le vecteur force, noté . On peut donc représenter l'action mécanique par un torseur, le torseur d'action :


Les composantes du torseur X, Y, Z, L, M et N sont appelés « éléments de réduction du torseur », le point où est calculé le moment est le « centre de réduction ». Les composantes X, Y et Z sont uniformes ; les composantes L, M et N changent selon la formule :

que l'on retient avec le moyen mnémotechnique « BABAR ».
Liaison mécanique
modifierUne liaison mécanique décrit un contact entre deux solides. On peut décrire la liaison de plusieurs manières :
- morphologique : on décrit la forme des surfaces en contact ; si l'on trempe un des solides dans de la peinture, c'est la trace qu'il laisse sur l'autre solide ;
- cinématique : on décrit les mouvement relatifs possibles entre les deux surfaces en contact, que l'on appelle « degrés de liberté » DL (ou DOF, degree of freedom ) ;
- statique : on décrit les actions mécaniques transmissibles (AMT), que l'on appelle aussi « degrés de liaison » ;
- géométrique : on décrit les éléments caractéristiques des objets liés, et en particulier
- les éléments coïncidents : la notion de contact implique que des éléments géométriques (point, demi-droite, droite, plan) doivent correspondre entre les deux solides ;
- les normales de contact : comme on suppose un blocage par obstacle, et une transmission d'effort par obstacle, les normales (droites perpendiculaires à la surface de contact) donnent les translations bloquées ainsi que les directions possibles des forces.
Notons que plusieurs formes de surface différentes (description morphologique) peuvent avoir les mêmes éléments géométriques. On considère dans un premier temps des liaisons idéales (ou parfaites), c'est-à-dire ayant un jeu minimal et pour lesquelles on peut négliger l'adhérence et le frottement.
On distingue 11 liaisons différentes. Les liaisons utiles pour décrire les déplacements imposés et contacts sont décrites ci-après.
Liaison sphère-plan
modifier




Également appelée liaison ponctuelle. Elle est utilisée pour les butées, les pieds d'appareils, …
Morphologie
La zone de contact est assimilée à un point (dimension 0) ; en réalité, en raison des imperfections de la matière et de son écrasement sous l'effet de la charge, il s'agit d'une petite surface.
Typiquement, une partie sphérique — ou du moins une surface de « petite taille » : tête de vis, pied de support, … — de la pièce 1 est en contact avec une partie plane de la pièce 2. On indique le point de contact A entre la sphère et le plan, ainsi que le vecteur normal du plan : .


Géométrie
Le centre de la sphère, , reste en permanence sur le plan qui est le plan parallèle à la surface de contact passant par B.
La normale de contact est la droite (AB) ; c'est le support des forces de contact entre 1 et 2 (rappel : d'un point de vue statique, ce n'est pas le point d'application qui importe mais la droite d'action). Si le rayon de la partie sphérique est faible (« tête d'épingle »), alors on peut considérer que A et B sont confondus.
Cinématique
Le contact empêche tout mouvement de pénétration ou de séparation, c'est-à-dire toute translation de la sphère selon . Par exemple, pour une liaison de normale , les degrés de liberté d'une pièce par rapport à l'autre sont :

| T | R | |
|---|---|---|
| X | 1 | 1 |
| Y | 1 | 1 |
| Z | 0 | 1 |
Statique
À l'inverse, la liaison ne peut transmettre que des forces perpendiculaires au plan. Les degrés de liaison sont :
| T | R | |
|---|---|---|
| X | 0 | 0 |
| Y | 0 | 0 |
| Z | 1 | 0 |
et le torseur des actions transmissibles s'écrit

Liaison linéaire annulaire
modifier



Elle est utilisée pour modéliser les centrages dégagés (locatings) et de manière générale tous les centrages courts, les pistons dans les pompes à pistons axiaux, les roulements à billes à contact radial qui ne sont pas bloqués en translation.
Morphologie
La zone de contact est un cercle ou un arc de cercle (une ligne annulaire)[5].
Typiquement, une partie sphérique de la pièce 1 est en contact avec un alésage (preçage long) de la pièce 2 ; ou bien, une partie cylindrique de la pièce 1 passe à travers un perçage court de la pièce 2. On indique le centre A entre la sphère ou du perçage court, ainsi que l'axe du cylindre : .

Géométrie
- Sphère (1) de centre A dans un cylindre (2) : le centre de la sphère reste sur l'axe ;
- cylindre (1) à travers un perçage court (2) : l'axe du cylindre passe par le centre du perçage .




Dans les deux cas, les normales sont les rayons du cercle de contact.
Cinématique
Le contact empêche tout mouvement de translation perpendiculairement à l'axe du cylindre, donc seule reste la translation dans l'axe du cylindre. Toutes les rotations sont possibles (rotulage). Les degrés de liberté d'une pièce par rapport à l'autre sont :
| T | R | |
|---|---|---|
| X | 1 | 1 |
| Y | 0 | 1 |
| Z | 0 | 1 |
Statique
À l'inverse, la liaison ne peut transmettre que des forces perpendiculaires à l'axe du cylindre. Les degrés de liaison sont :
| T | R | |
|---|---|---|
| X | 0 | 0 |
| Y | 1 | 0 |
| Z | 1 | 0 |
et le torseur des actions transmissibles s'écrit

Liaison linéaire rectiligne
modifier


Elle est utilisée pour orienter un objet posé sur un plan (règle d'orientation, de guidage).
Morphologie
La zone de contact est un segment de droite (rectiligne).
Typiquement, une partie cylindrique de la pièce 1 est en contact avec une partie plane de la pièce 2. On indique le centre A du segment, la normale du plan ainsi ainsi que l'axe du cylindre : .

Géométrie
L'axe du cylindre 1 reste sur un plan , parallèle au plan 2 et passant par A.

Cinématique
Le contact empêche tout mouvement de translation perpendiculairement au plan, et les rotation autour d'un axe du plan perpendiculaire à la ligne de contact. Les degrés de liberté d'une pièce par rapport à l'autre sont :
| T | R | |
|---|---|---|
| X | 1 | 1 |
| Y | 1 | 0 |
| Z | 0 | 1 |
Statique
À l'inverse, la liaison ne peut transmettre que des forces perpendiculaires au plan, et des moments selon l'axe sus-nommé. Les degrés de liaison sont :
| T | R | |
|---|---|---|
| X | 0 | 0 |
| Y | 0 | 1 |
| Z | 1 | 0 |
et le torseur des actions transmissibles s'écrit

Liaison appui plan
modifier


Elle est utilisée pour les surfaces de contact planes et étendues, mais aussi pour les butées à billes.
Morphologie
La zone de contact est une surface plane.
Une partie plane de la pièce 1 est en contact avec une partie plane de la pièce 2. On indique le centre A de la surface de contact entre les plans, ainsi que le vecteur normal des plans : .

Géométrie
Le plan de contact de la pièce 1 reste coïncident avec le plan de contact de la pièce 2.

Cinématique
Le contact empêche tout mouvement de pénétration ou de séparation, c'est-à-dire toute translation de la sphère selon ; il fixe également l'assiette (orientation du plan dans l'espace) en empêchant le roulis et le tangage, la seule rotation autorisée est selon un axe normal au plan. Par exemple, pour une liaison de normale , les degrés de liberté d'une pièce par rapport à l'autre sont :
| T | R | |
|---|---|---|
| X | 1 | 0 |
| Y | 1 | 0 |
| Z | 0 | 1 |
Statique
À l'inverse, la liaison ne peut transmettre des forces perpendiculaires au plan, et des couples d'axe parallèles au plan. Les degrés de liaison sont :
| T | R | |
|---|---|---|
| X | 0 | 1 |
| Y | 0 | 1 |
| Z | 1 | 0 |
et le torseur des actions transmissibles s'écrit

Liaison rotule
modifier


Également appelée liaison sphérique.
Certaines pièces sont des rotules fonctionnelles (dans le sens où l'on a besoin des trois rotations), mais la plupart du temps, on utilise des rotules lorsque l'on veut une liaison pivot qui accepte des défauts d'alignement. On peut citer par exemple les rotules de direction d'une voiture (entre la bielette et le porte-fusée) ou la tête rotulée d'un vérin. La liaison rotule sert également à modéliser le comportement d'un roulement à billes bloqué en translation ou d'un roulement à rouleaux coniques.
Morphologie
La zone de contact est une portion de sphère.
Une partie sphérique de la pièce 1 est en contact avec une calotte sphérique creuse de la pièce 2, les deux sphères étant concentriques et ayant le même rayon (au jeu près). On indique le centre A commun des deux sphères : LR(A).
Géométrie
Le centre de la boule 1 doit rester coïncident avec le centre de la calotte 2.
Les normales de contact sont les rayons de la sphère.
Cinématique
Le contact empêche tout mouvement de pénétration ou de séparation, c'est-à-dire toute translation de la sphère mâle dans la coupole. Seules les rotations sont possibles. Les degrés de liberté d'une pièce par rapport à l'autre sont :
| T | R | |
|---|---|---|
| X | 0 | 1 |
| Y | 0 | 1 |
| Z | 0 | 1 |
Statique
À l'inverse, la liaison peut transmettre des forces selon toutes les directions, mais aucun couple. Les degrés de liaison sont :
| T | R | |
|---|---|---|
| X | 1 | 0 |
| Y | 1 | 0 |
| Z | 1 | 0 |
et le torseur des actions transmissibles s'écrit

Liaison pivot glissant
modifier


Certaines pièces sont des pivots glissants fonctionels (dans le sens où l'on a besoin de la rotation et de la translation), mais la plupart du temps, on utilise ces liaisons lorsque l'on veut une liaison pivot ou bien une liaison glissière qui accepte des défauts d'alignement.
Morphologie
La zone de contact est un cylindre.
Une partie cylindrique de la pièce 1 est en contact avec un alésage de la pièce 2, les deux cylindres étant concentriques et ayant le même rayon (au jeu près). On indique l'axe (Δ) commun des deux sphères : LPG(Δ).
Géométrie
L'axe centre du cylindre 1 doit rester coïncident avec l'axe de l'alésage.

Les normales de contact sont les rayons du cylindre.
Cinématique
Le contact empêche tout mouvement de pénétration ou de séparation, c'est-à-dire toute translation radiale et toute rotation autre que d'axe (Δ). Seule une translation et une rotation sont possibles. Les degrés de liberté d'une pièce par rapport à l'autre sont :
| T | R | |
|---|---|---|
| X | 1 | 1 |
| Y | 0 | 0 |
| Z | 0 | 0 |
Statique
À l'inverse, la liaison peut transmettre des forces selon toutes les directions radiale, et des couples sauf selon l'axe. Les degrés de liaison sont :
| T | R | |
|---|---|---|
| X | 0 | 0 |
| Y | 1 | 1 |
| Z | 1 | 1 |
et le torseur des actions transmissibles s'écrit

Liaison encastrement
modifier
Également appelée liaison fixe. Elle sert à décrire les assemblages vissés, collés, soudés, bridés.
Il n'y a pas de géométrie particulière.
Les deux pièces sont solidaires et forment un ensemble rigide, une classe d'équivalence cinématique. Aucun mouvement relatif n'est possible.
Cette liaison transmet tous les efforts.
|
|
Torseur des actions transmissibles :
|

Liaison composée
modifierDeux pièce peuvent avoir plusieurs contacts entre elles. On parle alors de liaison composée. La notion de liaison composée est importante pour l'analyse structurale et fonctionnelle — détermination des mouvements possibles entre les pièces, de la fonction de chaque pièce (à ne pas confondre avec l'analyse fonctionnelle du projet, qui est une analyse du cahier des charges pour déterminer les fonctions de service, puis à la décomposition en fonctions techniques) — et le notion de mise en position (MiP).
Par contre, d'un point de vue de la statique, l'effort à chaque contact ne dépend que de la nature du contact ; le fait qu'il y ait plusieurs contacts ne change rien. Nous n'insisterons donc pas sur cette notion.
Simplification des problèmes plans
modifierLorsque
- les vecteurs forces sont tous parallèles à un plan ;
- les vecteurs moment sont tous perpendiculaires à ce plan ;
- le chargement du système étudié admet une symétrie par rapport à ce même plan ;
alors nous sommes dans l'hypothèse des problèmes plans.
Nous supposons que ce plan est le plan (O, x, y ). Nous avons donc pour toutes les actions :

Ceci simplifie l'expression des vecteurs :

on voit ainsi que les moments peuvent s'exprimer par un scalaire, N.
L'écriture des torseurs d'action transmissible au centre des liaisons devient :
- .

Par exemple, le torseur d'action transmissible d'une liaison pivot glissant d'axe x devient

et pour une liaison pivot glissant d'axe z :
- .

Statique
modifierLa statique est l'étude des solides à l'équilibre. Il s'agit essentiellement des solides au repos dans un référentiel galiléen, c'est-à-dire qui ne bougent pas ; il peut s'agir de déterminer les conditions nécessaire pour commencer un mouvement. Mais la statique peut aussi s'appliquer
- à des solides en mouvement, le mouvement étant rectiligne uniforme dans un référentiel galiléen ;
- à des solides au repos dans un référentiel non galiléen (moyennant l'utilisation des forces inertielles, voire la section Dynamique).
Principe fondamental de la statique
modifierLe principe fondamental de la statique (PFS) est une adaptation de la 2e loi de Newton au cas du solide à l'équilibre :
- le solide ne se translate pas, donc les forces extérieures qui agissent sur lui s'annulent ;
- le solide ne tourne pas, donc les moments extérieurs qui agissent sur lui s'annulent.
Expression vectorielle
modifier|
Théorème de la résultante statique (TRS) |
|
Si un solide S est à l'équilibre dans un référentiel galiléen, alors la résultante des forces extérieure qui agissent sur lui est nulle :
|

la notation S se lit « non-S » et désigne ce qui est à l'extérieur de S ; on utilise aussi parfois la notation « ext » (extérieur).
|
Théorème du moment résultant statique (TMRS) |
|
Si un solide S est à l'équilibre dans un référentiel galiléen, alors la résultante des moments extérieurs qui agissent sur lui est nulle quel que soit le pivot virtuel considéré :
|

Les moments comprennent les moments de couples ainsi que les moments des forces. Les moments des forces doivent tous être calculés par rapport au même point A ; celui-ci peut faire partie du solide ou pas.
Expression torsorielle
modifier|
Principe fondamental de la statique (PFS) |
|
Si un solide S est à l'équilibre dans un référentiel galiléen, alors le torseur résultant des actions extérieures qui agissent sur lui est nul :
|

On écrit parfois simplement
- .

Application
modifierConcrètement, quelle que soit l'expression utilisée, cela revient à résoudre un système de six équations à six inconnues :

On peut faciliter la résolution en choisissant judicieusement le pivot virtuel A. En effet, si l'on se place au point d'application d'une force, le moment de cette force est nul. Si le vecteur-force contient des inconnues, alors ces inconnues disparaissent des équations des moments. On choisit donc, pour calculer les moments/comme centre de réduction des torseurs, le point d'application de la force dont le vecteur a le plus d'inconnues.
Typiquement, ce point est le centre de la liaison ayant le plus de dégrés de liaison, c'est-à-dire le moins de degrés de liberté.
Théorie des mécanismes
modifierUn mécanisme est un ensemble de pièces liées les unes aux autres, les liaisons permettant le mouvement de certaines pièces par rapport à d'autres. Une des pièces sert de référence et est habituellement appelée « bâti ». Si toutes les pièces sont fixes par rapport au bâti, on parle plutôt de structure que de mécanisme. Le mécanisme sert à placer une pièce dans une position donnée, et/ou à appliquer un effort (pour déplacer une pièce, enlever ou déformer de la matière).
La difficulté d'un mécanisme tient au nombre de solides qui le compose, et au nombre de liaisons impliquées.
Le mécanisme possèdes des mobilités. Une mobilité est la possibilité de modifier la position des pièces par rapport au bâti. Le nombre de mobilités est appelé m ; c'est le nombre de paramètres qu'il faut fixer pour décrire la configuration du mécanisme (la position et l'orientaiton de chaque solide). On distingue :
- les mobilités utiles, au nombre de mu ;
- les mobilités inutiles, au nombre de mi : c'est le mouvement de pièces qui ne rend pas service à l'utilisateur ;
et l'on a bien sûr m = mu + mi. Le nombre mu est donné par le cahier des charges. Pour déterminer mi, il faut imaginer les pièces qui peuvent bouger lorsque l'on a fixé les mobilités utiles : on imagine que l'on saisit chaque pièce et l'on voit si l'on peut les bouger.
Les pièces doivent avoir un mouvement précis, donc doivent être guidées par des contacts avec d'autres pièces, des liaisons. Si les contacts sont justes suffisants, le système est dit isostatique. Si certaines contraintes sont redondantes, le système est dit hyperstatique. Un système hyperstatique est plus robuste, mais :
- il est plus cher à fabriquer : il faut s'assurer que les contraintes redondantes sont compatibles entre elles, ce qui nécessite une grande précision ; la dilatation viendra de toute manière modifier tout cela ;
- le système va présenter plus de frottement, donc un rendement moins bon et plus d'usure.
Analyse structurale et fonctionnelle
modifierLe but de l'analyse structurale et fonctionnelle est de comprendre comment fonctionne un mécanisme. Pour cela, on en fait une représentation simplifiée, sous deux formes : le schéma cinématique et le graphe des liaisons. C'est la démarche inverse de la conception : en conception, on part du cahier des charges, on détermine des fonctions techniques pour effectuer les tâches demandées, ce qui mène à la définition du schéma cinématique.
Pour mener l'analyse, on part du plan et de la nomenclature. On commence par exclure les pièces formables : ressorts, roulements, membranes, soufflets, … En effet, ces pièces jouent un rôle important mais ne permettent pas de comprendre comment fonctione le mécanisme.
Puis, on prend la première pièce disponible — la pièce 1 si elle n'a pas été exclue —, et l'on regarde toutes les pièces qui sont en liaison encastrement avec elle : pièces soudées, vissées, boulonées, montées en force (importance des ajustements), collées. On trace le controur de cet ensemble avec une couleur, et sur une feuille à part, on met les uméros de pièce dans un ensemble {1 ; …}. Cet ensemble constitue le sous-ensemble rigide n°1 (SE1), encore appelé classe d'équivalence (SE1).
On procède de même pour la première pièce libre suivante, et ce jusqu'à épuisement des pièces.
On considère maintenant non plus les pièces, mais les sous-ensembles rigide, chaque SE étant vu comme une seule pièce. On analyse les liaisons entre les SE :
- on repère les solutions technologiques standard :
- glissière à aiguilles, tenon-mortaise (dont queue d'aronde) : liaison glissière,
- roulement à billes dont une des bagues n'a pas d'obstacle en translation : liaison linéaire annulaire,
- roulement à billes dont toutes les bagues on un obstacle en translation : liaison rotule,
- roulement à rouleaux coniques : liaison rotule,
- roulement à aiguilles : liaison pivot,
- butée à billes, butée à rouleaux : liaison appui plan ;
- on analyse la morphologie et la géométrie de contact :
- centrage court : liaison linéaire annulaire,
- centrage long : liaison pivot glissant,
- appui plan sur plan, bossage : liaison appui plan,
- …
À partr de cela, on réalise le schéma cinématique : les SE sont remplacées par des traits, les contacts sont remplacés par les symboles normalisés. On réalise également le graphe des liaisons : les SE sont des bulles, les contacts sont des arcs reliant les bulles.
Exemple : analyse d'un serre-joint


Les sous-ensembles rigide du serre-joint sont :
- SE1 = {1 ; 2 ; 4 ; 5} ;
- SE2 = {3} ;
- SE3 = {6} ;
- SE4 = {7 ; 8 ; 9}.
-
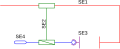 Schéma cinématique
Schéma cinématique -
 Graphe des liaisons
Graphe des liaisons

Degré d'hyperstaticité
modifierCinématique
D'un point de vue de la cinématique :
- l'état d'un pièce est décrit par 6 paramètres, on a donc 6 inconnues par pièce ;
- chaque contact, chaque liaison fixe un nombre de d'inconnues égal à son degré de liaison, le nombre d'inconnues restant à déterminer est le degré de liberté de la liaison ; on a au total Ic inconnues cinématiques, le bâti ne compte pas ;
- lorsque les pièces forment une chaîne fermée, on peut écrire qu'une pièce est immobile par rapport à elle-même, ce qui fournit 6 équations ; le nombre de cycles (ou nombre cyclomatique) est noté µ, le nombre total d'équations cinématiques est noté Ec, Ec = 6×µ ;
- les mobilités sont des paramètres libres, c'est-à-dire qui peuvent varier arbitrairement, ce qui permet le mouvement.
Si le système est isostatique, alors on a autant d'équations que d'inconnues à fixer :
- Ec = Ic - m.
On définit le degré d'hyperstaticité h :
- h = Ec - (Ic - m)
- h = 0 : le système est isostatique ;
- h > 0 : le système est hyperstatique de degré h.
Statique
D'un point de vue de la statique :
- chaque liaison transmet des efforts initialement inconnus ; le nombre d'inconnues est égal au degré de liaison, le nombre total d'inconnues statiques est noté Is ;
- l'équilibre de chaque pièce fournit 6 équations (PFS) ; de cela, il faut déduire le nombre de mobilités, puisque chaque mouvement possible implique que l'on ne peut pas appliquer la statique ; le nombre total d'équations statique est noté Es, le bâti ne compte pas.
Si le système est isostatique, alors on a autant d'équations que d'inconnues à fixer :
- Es = Is
(m est ici inclus dans Es). On définit le degré d'hyperstaticité h :
- h = Is - Es
- il est identique à celui trouvé en cinématique.
Détermination du degré d'hyperstaticité
Il est plus facile d'appréhender le concept de degré d'hyperstaticité avec la cinématique. Mais pour le calcul, il est plus simple de recourir à la statique.
Pour calculer le degré d'hyperstaticité, il faut :
- à partir du cahier des charges, déterminer le nombre mu de mobilités utiles ;
- à partir du schéma cinématique, déterminer le nombre mi de mobilités utiles ;
- à partir du graphe des liaisons, pour chaque liaison i, déterminer le nombre d'inconnues statiques Is i, qui est le degré de liaison ;
- déterminer le nombre p de pièces (bati compris).
Puis :
- degré de mobilité : m = mu + mi ;
- nombre d'équations statiques : Es = 6×(p - 1) - m ;
- h = Is - Es = ∑Is i - 6×(p - 1) + m.
Exemple
Considérons le serre-joint ci-dessus ; nous excluons de l'étude le mors mobile sur rotule rep. 6 (donc du SE3).
Le serre-joint a deux mobilités utiles : la translation du coulisseau 3 par rapport au rail 2, qui permet de s'ajuster à l'épaisseur des pièces à serrer, et le mouvement hélicoïdal de la vis 7 par rapport au coulisseau 3, qui permet le serrage. Donc mu = 2. Nous ne détectons pas de mobilité inutile, mi = 0.
Le nombre d'inconnues statique est :
- LG : 5 degrés de liaison ;
- LH : 5 " ;
soit Is = 10.
Nous avons trois pièces indépendantes, SE1, SE2 et SE4, donc p = 3.
De ceci, nous déduisons que :
- m = mu + mi = 2 + 0 = 2 ;
- Es = 6×(p - 1) - m = 6×(3 - 1) - 2 = 10 ;
- h = Is - Es = 10 - 10 = 0 ;
donc le système est isostatique.
Méthode de résolution d'un problème de statique
modifierDétermination de l'objectif et des hypothèses
modifierL'étude a un objectif ; il s'agit en général de connaître telle ou telle action de contact, pour pouvoir étudier ensuite la résistance d'une pièce ou d'une liaison. Pour un même système, selon l'objectif, on ne prendra pas les mêmes hypothèses, on n'effectuera pas les mêmes calculs.
Il faut ensuite fixer le référentiel, et les hypothèses simplificatrices : on néglige le poids de certaines pièces, le frottement de certaines liaisons, on applique la simplification des problèmes plans, …
Il faut enfin connaître les charges auxquelles est soumis l'ensemble, en particulier le poids des pièces.
Ceci constitue le « cahier des charges » du problème.
Représentation du problème
modifierLe problème consiste en général à étudier une système comprenant plusieurs solides. Le première étape consiste donc à déterminer le type de liaison entre les solides — sphère-plan, appui-plan, rotule, encastrement, … On détermine ainsi des sous-ensembles rigides, ou classes d'équivalence cinématiques, qui sont des pièces liées par des liaisons encastrement.
On en fait un schéma cinématique, utilisant les symboles normalisés, qui permet de comprendre la manière dont les pièces bougent les unes par rapport aux autres, et la manière dont les efforts se transmettent d'une pièce à l'autre. On fait également un graphe des liaisons, représentation abstraite mais synthétique.
Détermination de l'hyperstaticité
modifierÀ partir du graphe des liaisons, on calcule le degré d'hyperstaticité h. S'il est égal à 0, on peut résoudre le problème sans soucis. S'il est supérieur ou égal à 1, le problème est hyperstatique ; pour une résolution analytique, il faut prendre en compte la déformation des pièces pour avoir des équations supplémentaires.
On peut tout de même tenter de le résoudre par la statique seule :
- en prenant en compte des symétries, ce qui réduit le nombre d'inconnues statiques ;
- en modifiant des liaisons, afin de leur donner plus de degrés de liberté et donc forcer des inconnues statiques à 0.
Stratégie de résolution
modifierLa première étape consiste à repérer les pièces soumises uniquement à deux forces ; l'application du PFS permet de déterminer leur droite d'action commune, celle joignant les points d'application, ce qui réduit le nombre d'inconnues.
Puis, pour appliquer le PFS avec succès, il faut étudier un sous-ensemble
- sur lequel s'applique une charge connue ;
- qui ne contient pas plus de 6 inconnues statiques pour un problème spatial, ou pas plus de inconnues statiques pour un problème plan.
On peut repérer de tels sous-ensembles sur le graphe de liaisons.
Puis :
- On isole un sous-ensemble, et l'on fait le bilan des actions mécaniques extérieures agissant sur lui.
- On repère l'action de contact présentant le plus d'inconnues ; les moments sont calculés par rapport au centre de la liaison concernée (les torseurs sont transportés en ce point).
- On applique le PFS et l'on résoud le système d'équations.
Une fois cela fait, on applique le principe des actions réciproques, ce qui permet de déterminer les actions qui s'exercent sur les sous-ensmbles en contact avec le sous-ensemble étudié. On peut ainsi étudier l'équilibre des sous-ensembles voisins.
Conclusion
modifierIl faut conclure en fonction de ce qui a été établi dans le cahier des charges initial. En particulier : les hypothèses sont-elles valables ? L'objectif est-il atteint ?
Dynamique
modifierLa dynamique est l'étude des relations entre les efforts et les accélérations. Nous nous limitons essentiellement à deux cas : celui de la translation rectiligne, et celui de la rotation autour d'un axe fixe dans le référentiel. Le repère du référentiel est noté .

Cinématique
modifierPour définir la position d'un solide S, nous pouvons repérer chacun des points. Mais dans le cas d'un solide indéformable, on peut se contenter de repérer la position de trois points non alignés A, B et C :
- si l'on fixe la position de A, on peut encore faitre tourner le solide autour de A (rotule) ;
- si l'on fixe également la position de B, on peut encore faire tourner le solide autour de l'axe (AB) (pivot) ;
- fixer la position de C permet de figer la position du solide.
Il faut donc 6 paramètres indépendants : on a 9 coordonnées (3 coordonnées par point), mais elles ne sont pas libres, elles sont liées par le fait que le solide est rigide (3 équations AB = cte, BC = cte, CA = cte).
On peut ainsi définir un repère lié à S, . Pour simplifier, nous pouvons prendre le centre de gravité G comme centre du repère (A = G), et choisir un repère orthonormé direct.

Pour passer du repère au repère , il faut effectuer :

- une translation de vecteur ;
- une rotation de vecteur ;


la direction du vecteur est l'axe de rotation, la norme est l'angle de rotation (en radians, rad) et le sens du vecteur indique le sens de rotation, selon la règle de la main droite.

On définit par la suite la vitesse comme étant la variation de la position en fonction du temps. On définit ainsi :
- le vecteur vitesse ;
- le vecteur vitesse angulaire .


Et on définit l'accélération comme étant la variation de la vitesse en fonction du temps, soit :
- le vecteur accélération ;
- le vecteur accélération angulaire .


Pour un point M quelconque de S, on a :

Le champ des vecteurs vitesse de S est donc un champ équiprojectif de résultante . On peut ainsi définir le torseur cinématique du mouvement de S par rapport au référentiel , :



Par la suite, nous omettrons l'indice s'il n'y a pas d'ambigüité.

Quantité de mouvement et moment cinétique
modifierLa quantité de mouvement, également appelée impulsion, est le vecteur défini par


où m est la masse du système, représentant l'inertie en translation. Le moment cinétique par rapport à un point O est le vecteur défini par :


où est la quantité de mouvement d'un élément de matière de volume dV autour de M :

- .

Si l'on considère un objet en rotation autour d'un axe fixe (Δ) passant par le centre de gravité de l'objet, alors on prend l'origine en G et le moment cinétique devient

où J(Δ) est le moment d'inertie de l'ensemble par rapport à l'axe de rotation (Δ) ( est porté par la droite (Δ)). Ce moment d'inertie est calculé par

où r(Δ)(M) est la distance de M à (Δ).
Le moment cinétique représente donc l'inertie en rotation du solide ; il dépend de la répartition de la masse autour de l'axe. Il s'exprime en kilogramme mètre carré (kg·m2).
Si l'on revient à la définition initiale du moment cinétique, on a :

donc le moment cinétique est un champ équiprojectif de résultante . On peut donc définir le torseur cinétique (à ne pas confondre avec le torseur cinématique) :
- .

Principe fondamental de la dynamique
modifierEn mécanique du point, le principe fondemental de la dynamique (PFD) est la seconde loi de Newton. Cette loi a été reformulée en mécanique du solide par Euler[6].
Expression avec la quantité de mouvement et le moment cinétique
modifier|
Théorème de la résultante dynamique (PFD en translation, 1re loi d'Euler) |
|
Dans un référentiel galiléen :
|

|
Théorème du moment résultant dynamique (PFD en rotation, 2nde loi d'Euler) |
|
Dans un référentiel galiléen :
|

Expression torsorielle
modifierOn définit le vecteur quantité d'accélération

et le vecteur moment dynamique

On a

donc le champ de vecteurs est un champ équiprojectif de résultante . On peut ainsi définir le torseur dynamique :



|
Principe fondamental de la dynamique (avec les torseurs) |
|
Dans un référentiel galiléen, on a |

Expression avec les accélérations
modifierSi l'on suppose que :
- La rotation se fait autour d'un axe fixe (Δ) passant par G, et
- La masse et le moment d'inertie sont constants,
alors on peut écrire le PFD de la manière suivante.
|
Théorème de la résultante dynamique |
|
Dans un référentiel galiléen :
|

|
Théorème du moment résultant dynamique |
|
Dans un référentiel galiléen :
|

Référentiel non-galiléen
modifierThéorie des poutres
modifier

Rappelons quelques éléments utiles de la théorie des poutre.
Hypothèses
modifier- La matière est continue, homogène et isotrope ; elle a un comportement élastique linéaire ;
- les pièces étudiées
- sont élancées : la longueur L est grande devant la plus grande dimension transverse H (rapport L/H supérieur à 10),
- ont une courbure faible : le rayon de courbure ρ de la fibre neutre est grand devant la longueur L de la poutre (rapport ρ/L supérieur à 5),
- la section varie faiblement et de manière progressive : pour un congé ou une rainure, le rayon vaut au moins 0,8 la dimension transverse la plus faible avec une variation de section inférieure à 10 % ;
- le cas de charge provoque de petites déformations : les sections droites restent planes et perpendiculaires à la fibre neutre.
Par convention (Eurocode 3), on définit les repères locaux suivants :
- le centre du repère est le centre de gravité de la section droite ;
- l'axe x est perpendiculaire à la section droite ; c'est l'axe principal de la poutre ;
- l'axe y est l'axe de forte inertie, c'est-à-dire que la poutre est plus rigide en flexion autour de y ; c'est en général la dimension transverse la plus petite ;
- l'axe z est l'axe de faible inertie ; c'est en général la dimension transverse la plus grande.
Poutres minces ou épaisses
modifier- Théorie des poutres minces
Pour les poutres minces (rapport L/H ≥ 20), on utilise la théorie d'Euler-Bernoulli qui néglige la déformation en cisaillement dans le cas de la flexion.
- Théorie des poutres épaisses
Pour les poutres épaisses (20 ≥ L/H ≥ 10), on utilise la théorie de Timoshenko qui prend en compte le cisaillement dans le cas de la flexion.
Caractéristiques de la section
modifierD'un point de vue mécanique, la section droite peut être décrite par six paramètres :
- son aire S ;
- son moment quadratique de torsion IG ;
- ses moments quadratiques de flexion IGy et IGz ;
- ses dimensions transverses vy et vz.
En général, vz est la dimension transverse la plus grande (vz = H). Pour une poutre de section circulaire (cylindre plein ou tube), la dimension transverse unique est le rayon R (vy = vz = R).
Principe de la coupure et efforts intérieurs
modifierOn effectue une coupure virtuelle à une abscisse x de la poutre, qui sépare celle-ci en deux tronçons : le tronçon de gauche I et le tronçon de droite II. Les efforts de cohésion, ou efforts intérieurs, peuvent être définis de deux manières :
- action du tronçon I sur le tronçon II : on fait la somme des actions extérieures s'exerçant sur le tronçon I (le tronçon I relaie les efforts qu'il subit), c'est la convention de la somme des actions à gauche ;
- action du tronçon II sur le tronçon I : on fait la somme des actions extérieures s'exerçant sur le tronçon II, c'est la convention de la somme des actions à droite.
La convention détermine le signe des actions ; de fait, on ne s'intéresse qu'à la valeur absolue des efforts de cohésion.
On obtient ainsi un torseur de cohésion défini au centre de gravité G de la section de coupure :

avec
- N : effort normal, provoque de la traction/compression ;
- Ty, Tz : efforts tranchants, provoquent du cisaillement, négligé pour les poutres minces ;
- Mt : moment de torsion, provoque de la torsion ;
- Mfy, Mfz : moments de flexion, provoquent de la flexion.
Diagrammes des efforts intérieurs
modifierPrincipe d'équivalence
modifierSelon le principe de Barré de Saint-Venant, si l'on se place loin du point d'application des efforts extérieurs, alors on peut relier les composante du torseur de cohésion aux contraintes qui s'exercent sur la section :
- N : contrainte normale uniforme σ0 = N/S ;
- Mt : contrainte de cisaillement ; pour une section circulaire, cette contrainte varie linéairement selon le rayon, τ(r ) = (Mt/IG)×r ;
- Mfy : contrainte normale variant linéairement selon z : σ(z ) = (Mfy/IGy)×z ;
- Mfz : contrainte normale variant linéairement selon y : σ(y ) = (Mfz/IGz)×y.
Pour la torsion et la flexion, la contrainte est maximale au plus loin du centre de gravité, on a donc respectivement
- τmax = Mt/C
avec la constante de torsion circulaire C = IG/R ; - σmax = Mfy/Wy
avec le module de flexion Wy = IGy/vz ; - σmax = Mfz/Wz
avec le module de flexion Wz = IGz/vy.
Le cas de la torsion des sections non circulaires est plus complexe.
-
 Contrainte normale en traction
Contrainte normale en traction -
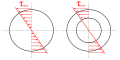 Contrainte de cisaillement en torsion pour une pièce pleine et creuse.
Contrainte de cisaillement en torsion pour une pièce pleine et creuse. -
 Contriante normale en flexion
Contriante normale en flexion



Pour les calculs, on utilise en général soit les unités internationales (newton, mètre, pascal), soit les unités « technologiques » (newton, millimètre, mégapascal).
| Grandeur | Unité internationale |
Unité technologique |
|---|---|---|
| Dimensions R, vy, vz |
m | mm |
| Forces N, Ty, Tz |
N | N |
| Moments, couples Mt, Mfy, Mfz |
Nm | Nmm |
| Aire S |
m2 | mm2 |
| Moments quadratiques IG, IGy, IGz |
m4 | mm4 |
| Constante de torsion circulaire C |
m3 | mm3 |
| module de flexion Wy, Wz |
m3 | mm3 |
| Contraintes σ, τ | Pa | MPa |
Dans les tables de profilés, les valeurs des moments quadratique sont en général en cm4 ; les constantes de torsion et modules de flexion sont en cm3.
Déformation
modifierMécanique des milieux continus
modifierNotes et références
modifier- ↑ Isaac Newton, 1634-1727, philosophe, mathématicien, physicien, alchimiste, astronome et théologien anglais
- ↑ Gaspard-Gustave Coriolis (1792-1843), mathématicien et ingénieur français
- ↑ jusqu'alors, on pensait que c'était la vitesse qui était proportionnelle à la force
- ↑ il vérifie la relation d'équiprojectivité :
- ↑ la zone de contact entre une sphère et un cône est aussi un cercle, mais la liaison est alors une rotule : la direction des normales est différente
- ↑ Leonhard Euler (1707-1783), mathématicien et physicien suisse
